Hi. I'm Yisha.
About Me
Sha Yi / [Yisha] / 伊 莎
My research interest centers on designing and controlling novel robotic systems.
I am a PhD student in the Robotics Institute at Carnegie Mellon University coadvised by Katia Sycara and Zeynep Temel. My research is supported by the CMU Presidential Fellowship (2020 - 2021). Prior to this, I received my MS degree from the same department with Katia Sycara. I completed my BEng in Electronics and Information Engineering at The Hong Kong Polytechnic University.
Publications

Enhancing Heterogeneous Swarm Locomotion Through Simple 1-DOF Arm Mechanisms
under review
James Clinton, Sha Yi, Zeynep Temel
Reconfigurable Robot Control Using Flexible Coupling Mechanisms
Robotics: Science and Systems (RSS), 2023
Sha Yi, Katia Sycara, Zeynep Temel
Configuration Control for Physical Coupling of Heterogeneous Robot Swarms
International Conference on Robotics and Automation (ICRA), 2022
Sha Yi, Zeynep Temel, Katia Sycara
[pdf] [code] [video] [supplement video]
PuzzleBots: Physical Coupling of Robot Swarms
International Conference on Robotics and Automation (ICRA), 2021
Sha Yi, Zeynep Temel, Katia Sycara
[pdf] [how to build them] [video]
Distributed Topology Correction for Flexible Connectivity Maintenance in Multi-Robot Systems
International Conference on Robotics and Automation (ICRA), 2021
Sha Yi, Wenhao Luo, Katia Sycara
[pdf]
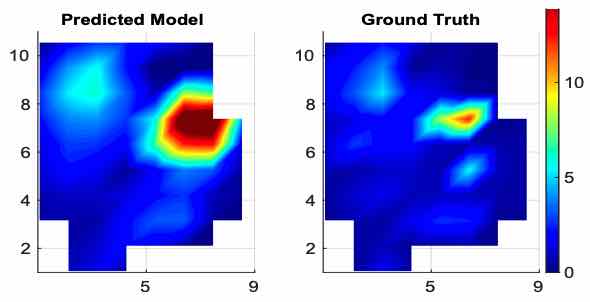
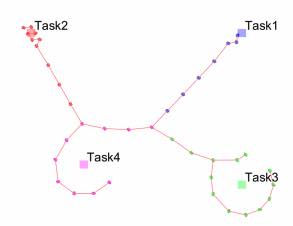
Adaptive Informative Sampling with Environment Partitioning for Heterogeneous Multi-Robot Systems
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
Yunfei Shi, Ning Wang, Jianmin Zheng, Yang Zhang, Sha Yi, Wenhao Luo, Katia Sycara
[pdf]
Behavior Mixing with Minimum Global and Subgroup Connectivity Maintenance for Large-Scale Multi-Robot Systems
International Conference on Robotics and Automation (ICRA), 2020
Wenhao Luo, Sha Yi, Katia Sycara
[pdf]
Teaching
16-811 Math Fundamentals for Robotics
16-711 Kinematics, Dynamics, and Control