Sha Yi

[Yisha] [伊 莎] shayi@ucsd.edu
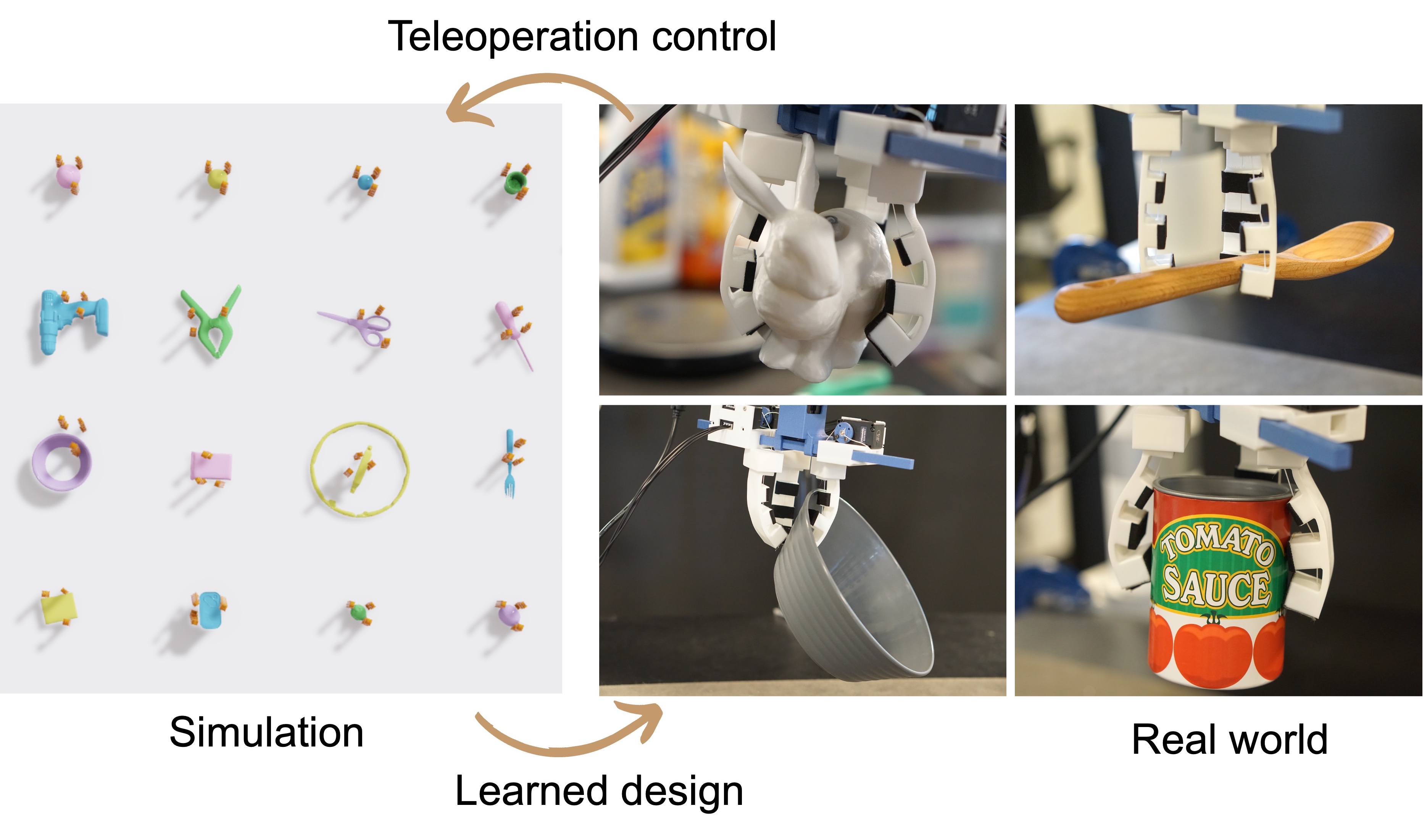
My research interest centers on using machine learning to design and control novel robotic systems.
I am a Postdoc at UC San Diego working with Xiaolong Wang and Mike Tolley, exploring data-driven approaches for robot design.
I completed my PhD from the Robotics Institute at Carnegie Mellon University coadvised by Katia Sycara and Zeynep Temel. My research is supported by the CMU Presidential Fellowship (2020 - 2021). Prior to this, I received my MS degree from the same department with Katia Sycara. I completed my BEng in Electronics and Information Engineering at The Hong Kong Polytechnic University.
I also spent time at Amazon Robotics, Microsoft, and a couple of early-stage startups.
News
- [2025/10] I’m selected as a Rising Star at the MIT EECS Rising Star workshop in Boston.
- [2025/9] I co-organized a workshop at CoRL 2025 on Human to Robot (H2R): Workshop on Sensorizing, Modeling, and Learning from Humans.
- [2025/5] We organized a workshop at RSS 2025 on Brain and Brawn: Robot Hardware-Aware Intelligence! .
- [2024/5] We organized a workshop at ICRA 2024 on Unconventional Robots: Universal Lessons for Designing Unique Systems! See more on Twitter.
Selected Publications
- Reconfigurable Robot Swarms for Terrain Traversal with Passive Coupling MechanismsAutonomous Robots, 2025
-
 Enhancing Heterogeneous Swarm Locomotion Through Simple 1-DOF Arm MechanismsIn International Symposium on Distributed Autonomous Robotic Systems (DARS), 2024Also presented at Workshop in Tensegrity Robots, IROS, 2023, Best Demo Award
Enhancing Heterogeneous Swarm Locomotion Through Simple 1-DOF Arm MechanismsIn International Symposium on Distributed Autonomous Robotic Systems (DARS), 2024Also presented at Workshop in Tensegrity Robots, IROS, 2023, Best Demo Award